Retired Document
Important: OpenCL was deprecated in macOS 10.14. To create high-performance code on GPUs, use the Metal framework instead. See Metal.
Creating and Managing Image Objects In OpenCL
OpenCL has built-in support for processing image data. Using image objects, you can take image data that resides in host memory and make it available for processing in a kernel executing on an OpenCL device. Image objects simplify the process of representing and accessing image data since they offer native support for a multitude of image formats. If you are writing kernel functions that need to efficiently perform calculations on image data, you will find OpenCL for OS X’s native support for images useful.
This chapter illustrates how to take image data residing in host memory and place it into image objects that a kernel can access. It also provides an overview of how to go about processing this image data. See Parameters That Describe Images and Buffers in OS X OpenCL for conceptual descriptions of the kinds of parameters typically passed to these functions.
Creating and Using Images in OpenCL
To create image objects, use gcl_create_image. This function can be used to create two-dimensional image and three-dimensional image objects. To specify a two-dimensional image, set the image_depth parameter to 0. To create a three-dimensional image object, specify the image_depth in pixels. If you pass an IOSurfaceRef as the io_surface parameter, the image will be created using the IOSurface you pass. Otherwise, set the io_surface parameter to NULL.
cl_image gcl_create_image( |
const cl_image_format *image_format, |
size_t image_width, |
size_t image_height, |
size_t image_depth, |
IOSurfaceRef io_surface |
); |
Parameter | Description |
|---|---|
| An OpenCL image format descriptor. |
| The image width in pixels. |
| The image height in pixels. |
| The image depth in pixels. |
| If you pass an |
| |
Reading, Writing, and Copying Image Objects
After you’ve created the image object, you can enqueue reads, writes, and copies between it and host memory. From your host application, you can use the following functions:
To copy data between two images or to copy data from one portion of an image to another portion (in the same image), call:
void gcl_copy_image(
cl_image dst_image,
cl_image src_image,
const size_t dst_origin[3],
const size_t src_origin[3],
const size_t region[3]);
The copy starts from
src_origin(an x, y, z value) and starts writing atdst_origin(also x, y, z). It copies the two- or three-dimensional rectangular amount specified byregion. Because we are copying between images, all parameters are specified in pixels.To copy data from an image to a buffer, call:
void gcl_copy_image_to_ptr(
void *buffer_ptr,
cl_image src_image,
const size_t src_origin[3],
const size_t region[3]);
The
buffer_ptrparameter points to the destination buffer to which pixels will be copied. Thesrc_imageis the image from which pixels are to be copied. Thesrc_originis the first pixel to be copied. Theregionis the region to which pixels are to be copied. Because we are copying from an image, the origin and region are specified in pixels.For example, say we have a 4 pixel x 4 pixel image. Each pixel requires 4 bytes, one byte for each red, green, blue, and alpha channel. In this example, we want to take a portion of this image data—say a region 3 pixels wide and 2 pixels high—starting at pixel 1,1 of the image and copy this portion of the image to a buffer. In Figure 8-1, we would want to copy all the light and dark green pixels, but not the gray pixels.
Figure 8-1 Copying a portion of an image to a buffer 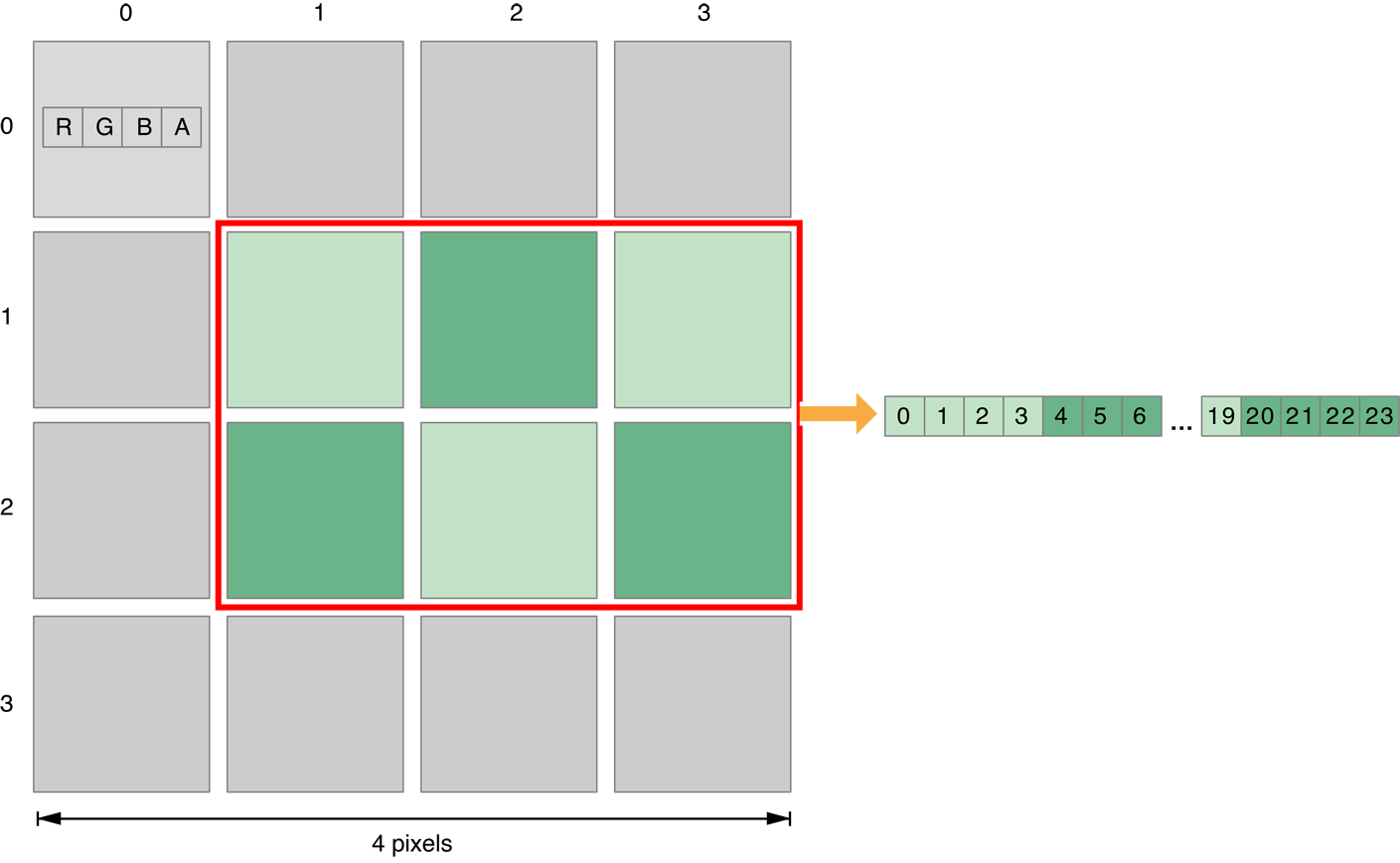
Because our image requires four bytes per pixel and we want to copy out 3 x 2 = 6 pixels, we require a buffer of (at least) 6 x 4 = 24 bytes to accommodate the copy.
The call would look like this:
const size_t origin[3] = { 1, 1, 0 };const size_t region[3] = { 3, 2, 1};gcl_copy_image_to_ptr(our_buffer, the_image, origin, region);
To copy data from a buffer to an image, call:
void gcl_copy_ptr_to_image(
cl_image dst_image,
void *src_buffer_ptr,
const size_t dst_origin[3],
const size_t buffer_region[3]);
The parameters you pass to the
gcl_copy_ptr_to_imagefunction are similar to those passed to thegcl_copy_image_to_ptrfunction, except that the destination is the image and the pixels are being copied from a buffer.
Accessing Image Objects From a Kernel
The gcl_copy* functions enable you to move images to and from host memory. To actually process this image data on a device, you have to make this data available to the work items that execute on the device. The following sections show you how to pass your data to the kernels for further processing.
See How the Kernel Interacts With Data in OS X OpenCL for more information.
Mapping Image Objects
To map a region in an image into the host address space, call:
void *gcl_map_image(cl_image image, |
cl_map_flags map_flags, |
const size_t origin[3], |
const size_t region[3]); |
Returns a pointer to the region it has mapped.
Parameter | Description |
|---|---|
| The image to be mapped. |
| Bitfield specifying |
| The (x, y, z) position in pixels in the image at which to start the mapping. |
| The region (in pixels) to read. |
This function provides functionality similar to that of the OpenCL standard clEnqueueMapImage function.
Unmapping Image Objects
To unmap memory mapped by the gcl_map_ptr or gcl_map_image functions, call:
void gcl_unmap(void *ptr); |
Parameter | Description |
|---|---|
| Pointer to the device memory, or image, to unmap. |
Retaining and Releasing Image Objects
To avoid memory leaks, image objects should be freed when they are no longer needed.
void gcl_retain_image(cl_image image)void gcl_release_image(cl_image image)
Example
In the following example, the host creates one image for input and one image for output, calls the kernel to swap the red and green pixels, then checks the results.
Listing 8-1 Sample host function creates images then calls kernel function
#include <stdio.h> |
#include <stdlib.h> |
#include <OpenCL/opencl.h> |
// Include the automatically-generated header which provides the kernel block |
// declaration. |
#include "kernels.cl.h" |
#define COUNT 2048 |
static void display_device(cl_device_id device) |
{ |
char name_buf[128]; |
char vendor_buf[128]; |
clGetDeviceInfo(device, CL_DEVICE_NAME, sizeof(char)*128, name_buf, NULL); |
clGetDeviceInfo(device, CL_DEVICE_VENDOR, sizeof(char)*128, vendor_buf, NULL); |
fprintf(stdout, "Using OpenCL device: %s %s\n", vendor_buf, name_buf); |
} |
static void image_test(const dispatch_queue_t dq) |
{ |
// This example uses a dispatch semaphore to achieve synchronization |
// between the host application and the work done for us by the OpenCL device. |
dispatch_semaphore_t dsema = dispatch_semaphore_create(0); |
// This example creates a "fake" RGBA, 8-bit-per channel image, solid red. |
// In a real program, you would use some real raster data. |
// Most OpenCL devices support a wide variety of image formats. |
unsigned int i; |
size_t height = 2048, width = 2048; |
unsigned int *pixels = |
(unsigned int*)malloc( sizeof(unsigned int) * width * height ); |
for (i = 0; i < width*height; i++) |
pixels[i] = 0xFF0000FF; // 0xAABBGGRR: 8bits per channel, all red. |
// This image data is on the host side. |
// You need to create two OpenCL images in order to perform some |
// manipulations: one for the input and one for the ouput. |
// This describes the format of the image data. |
cl_image_format format; |
format.image_channel_order = CL_RGBA; |
format.image_channel_data_type = CL_UNSIGNED_INT8; |
cl_mem input_image = gcl_create_image(&format, width, height, 1, NULL); |
cl_mem output_image = gcl_create_image(&format, width, height, 1, NULL); |
dispatch_async(dq, ^{ |
// This kernel is written such that each work item processes one pixel. |
// Thus, it executes over a two-dimensional range, with the width and |
// height of the image determining the dimensions |
// of execution. |
cl_ndrange range = { |
2, // Using a two-dimensional execution. |
{0}, // Start at the beginning of the range. |
{width, height}, // Execute width * height work items. |
{0} // And let OpenCL decide how to divide |
// the work items into work-groups. |
}; |
// Copy the host-side, initial pixel data to the image memory object on |
// the OpenCL device. Here, we copy the whole image, but you could use |
// the origin and region parameters to specify an offset and sub-region |
// of the image, if you'd like. |
const size_t origin[3] = { 0, 0, 0 }; |
const size_t region[3] = { width, height, 1 }; |
gcl_copy_ptr_to_image(input_image, pixels, origin, region); |
// Do it! |
red_to_green_kernel(&range, input_image, output_image); |
// Read back the results; then reuse the host-side buffer we |
// started with. |
gcl_copy_image_to_ptr(pixels, output_image, origin, region); |
// Let the host know we're done. |
dispatch_semaphore_signal(dsema); |
}); |
// Do other work, if you'd like... |
// ... but eventually, you will want to wait for OpenCL to finish up. |
dispatch_semaphore_wait(dsema, DISPATCH_TIME_FOREVER); |
// We expect '0xFF00FF00' for each pixel. |
// Solid green, all the way. |
int results_ok = 1; |
for (i = 0; i < width*height; i++) { |
if (pixels[i] != 0xFF00FF00) { |
fprintf(stdout, |
"Oh dear. Pixel %d was not correct. |
Expected 0xFF00FF00, saw %x\n", |
i, pixels[i]); |
results_ok = 0; |
break; |
} |
} |
if (results_ok) |
fprintf(stdout, "Image results OK!\n"); |
// Clean up device-size allocations. |
// Note that we use the "standard" OpenCL API here. |
clReleaseMemObject(input_image); |
clReleaseMemObject(output_image); |
// Clean up host-side allocations. |
free(pixels); |
} |
int main (int argc, const char * argv[]) |
{ |
// Grab a CPU-based dispatch queue. |
dispatch_queue_t dq = gcl_create_dispatch_queue(CL_DEVICE_TYPE_CPU, NULL); |
if (!dq) |
{ |
fprintf(stdout, "Unable to create a CPU-based dispatch queue.\n"); |
exit(1); |
} |
// Display the OpenCL device associated with this dispatch queue. |
display_device(gcl_get_device_id_with_dispatch_queue(dq)); |
image_test(dq); |
fprintf(stdout, "\nDone.\n\n"); |
dispatch_release(dq); |
} |
Listing 8-2 Sample kernel swaps the red and green channels
// A simple kernel that swaps the red and green channels. |
const sampler_t sampler = CLK_NORMALIZED_COORDS_FALSE | CLK_FILTER_NEAREST; |
kernel void red_to_green(read_only image2d_t input, write_only image2d_t output) |
{ |
size_t x = get_global_id(0); |
size_t y = get_global_id(1); |
uint4 tap = read_imageui(input, sampler, (int2)(x,y)); |
write_imageui(output, (int2)(x,y), tap.yxzw); |
} |
Copyright © 2018 Apple Inc. All Rights Reserved. Terms of Use | Privacy Policy | Updated: 2018-06-04